上海邵歐自動化設備有限公司
Shanghai Shaoou Automation Equipment Co., Ltd
全國免費服務熱線:
15000119495
15000119495
Shanghai Shaoou Automation Equipment Co., Ltd


產品描述
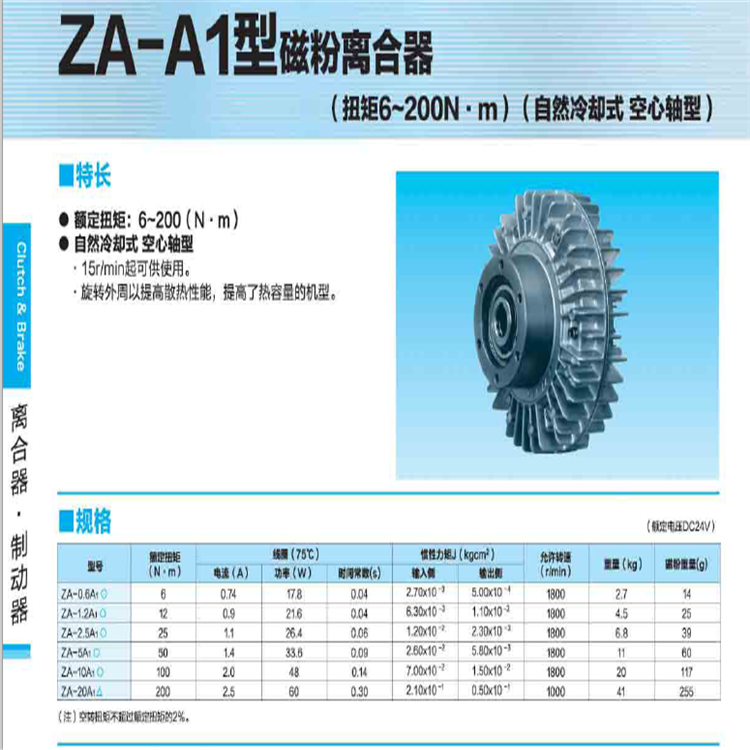
三菱空心軸磁粉制動器ZA-1.2Y1特價
智能型工作制動器為實現對制停距離和大制停減 速度的安全控制,就需要采用與常規機-電式制動器不同的工作方式。可變制動力需要制動器在受控狀態下實施工作制動,就不能采用直接斷電上閘的動作方式。為此需要工作制動器采用與驅動主機電源分別控制,并且在電氣安全回路起作用時不能直接切斷制動器電源。當該類制動器性能在失電情況下可能導致產生大制動力時,為了防止自動扶梯在電源故障斷電時可能產生的非受控制動力造成制停減速度超標,還需對該類工作制動 器配置應急能源以**故障斷電時的緊急制動及控制減速度。當采用非機-電式制動器時,按照安全規范的要求,還應配置符合安全規范規定的附加制動器。
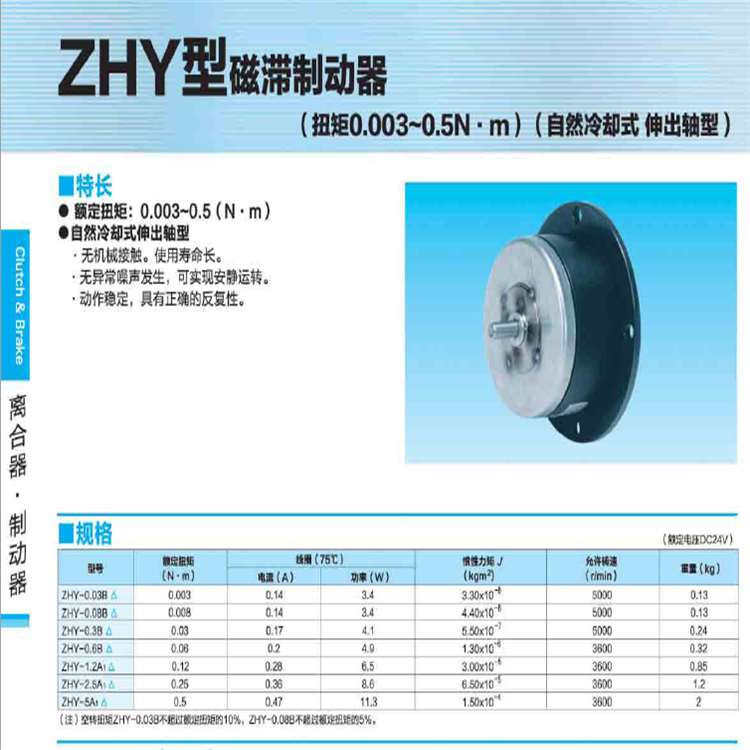
電磁制動器可分為電磁粉末制動器和電磁渦流制動器,電磁摩擦式制動器等多種形式。另外還細分為干式單片電磁制動器、干式多片電磁制動器、濕式多片電磁制動器等等。按制動方式電磁制動器又可分為通電制動和斷電制動。

您是第4796456位訪客
版權所有 ©2025-05-10 滬ICP備16049765號-2
上海邵歐自動化設備有限公司 保留所有權利.
手機網站
地址:上海市 奉賢區 金匯鎮 百曲村 萬順路1號1502
聯系人:李先生先生(經理)
微信帳號:15000119495






