輸入電壓115-230VAC
電流0-5A
輸出電壓0-180VDC
適配電機直流電機
適用場合機械傳動
材質不銹鋼和銅
電機響應時間0.1秒
驅動器輸出方式電壓輸出
驅動器電壓24VDC
驅動器電流5A
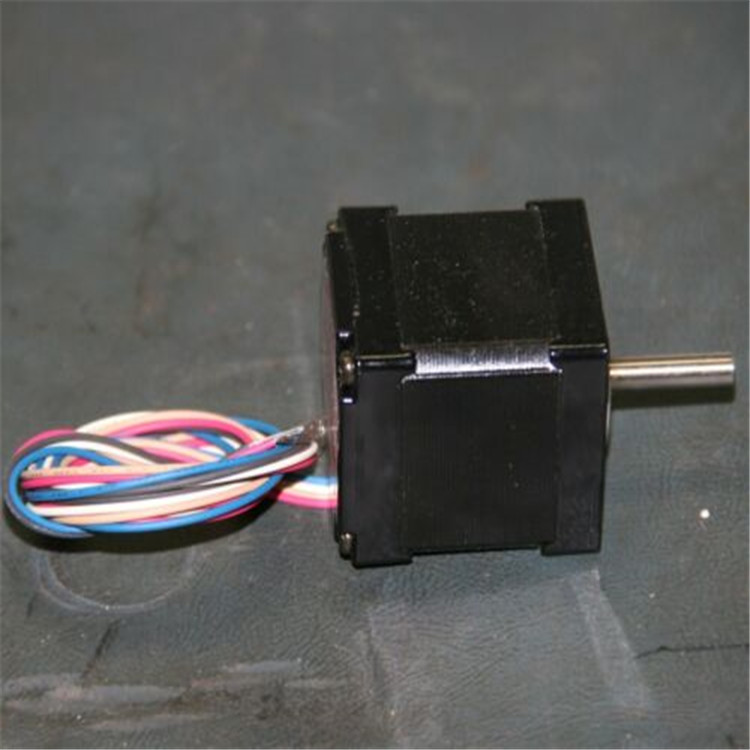
MYCOM步進電機從其結構形式上可分為反應式步進電機(Variable Reluctance,VR)、永磁式步進電機Permanent Magnet,PM)、混合式步進電機(Hybrid Stepping,HS)、單相步進電機、平面步進電機等多種類型,在我國所采用的步進電機中以反應式步進電機為主。步進電機的運行性能與控制方式有密切的關系,步進電機控制系統從其控制方式來看,可以分為以下三類:開環控制系統、閉環控制系統、半閉環控制系統。半閉環控制系統在實際應用中一般歸類于開環或閉環系統中。
SNC-230
SNC-430
MC-230
MC-430
ECM-010
CBS50-010-4520
CBS50-010-4580
CBS50-110-6571
CBS50-110-6641
CBS50-110-6701
CBS50-110-6931
NSM50-4520
NSM50-4580
智能控制不依賴或不完全依賴控制對象的數學模型 ,只按實際效果進行控制 , 在控制中有能力考慮系統的不確定性和性 , 突破了傳統控制必須基于數學模型的框架 。目前 , 智能控制在步進電機系統中應用較為成熟的是模糊邏輯控制 、網絡和智能控制的集成 。
模糊控制就是在被控制對象的模糊模型的基礎上 ,運用模糊控制器的近似推理等手段 ,實現系統控制的方法 。作為一種直接模擬人類思維結果的控制方式 , 模糊控制已廣泛應用于工業控制領域 。與常規控制相比 ,模糊控制無須的數學模型 , 具有較強的魯棒性 、自適應性 , 因此適用于非線性 、時變 、時滯系統的控制 。文獻[ 16] 給出了模糊控制在二相混合式步進電機速度控制中應用實例 。系統為超前角控制 ,設計無需數學模型 ,速度響應時間短 。
IMS500-020L-535EA(B)
IMS500-020L-543AC(BC)
IMS500-020L-544AC(BC)
IMS500-020L-545AC(BC)
IMS500-120L-564AC(BC)
IMS500-120L-566AC(BC)
IMS500-120L-569AC(BC)
PEE533-A
PF564-AC
PF566-AC
PF569-AC
IMS500-020L
IMS500-120L
PCE5431-BC
PCE5441-BC
PCE5451-BC
PCE5641-BC
PCE5661-BC
PCE5691-BC
PCE5961-BC
PCE5991-BC
PCE59131-BC
PCE5641-ACM
PCE5661-ACM
PCE5691-ACM
PCE5961-ACM
PCE5991-ACM
PCE59131-ACM

SNC-200CP
ECM-011
SND100-220L
SND100
SND101
SND102
SND110
SND111
SND112
INS50-110
INS50-210
INS50-120
INS50-220
INS50-110-5641AC(BC)
INS50-110-5661AC(BC)
INS50-110-5691AC(BC)
INS50-110-5961AC(BC)
INS50-110-5991AC(BC)
INS50-110-59131AC(BC)

PF264-A
PF265-A
PF268-A
INS200-030L
INS200-230L
INS200-230L-243A
INS200-230L-244A
INS200-230L-245A
INS200-230L-264A
INS200-230L-265A
INS200-230L-268A
目前 ,很多學者將自適應控制與其他控制方法相結合 ,以解決單純自適應控制的不足。文獻設計的魯棒自適應低速伺服控制器 ,確保了轉動脈矩的好大化補償及伺服系統低速高精度的跟蹤控制性能 。文獻實現的自適應模糊 PID 控制器可以根據輸入誤差和誤差變化率的變化 , 通過模糊推理在線調整 PID參數 ,實現對步進電機的自適應控制 , 從而有效地提高系統的響應時間 、計算精度和抗干擾性 。
http://www.china-westdev.com